Drone Surveys for Ecological Purposes
Through the application of photogrammetry and post-processing software, this standard imagery can be converted into measurable, actionable data for ecological assessment.
Below is an overview of the ecological drone survey services we offer, utilizing RGB cameras and advanced data interpretation techniques.
Drone Data Collection Planning
Habitat Mapping and Land Cover Classification Surveys
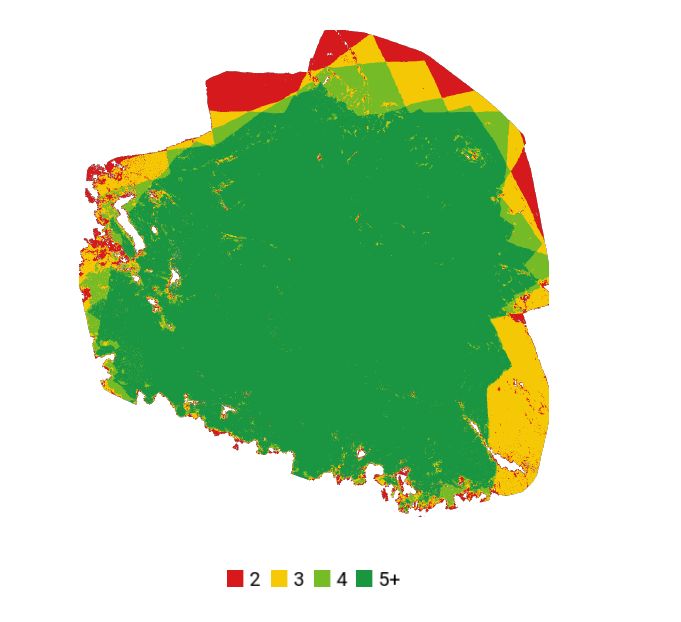
Our habitat mapping surveys generate high-resolution orthomosaics—distortion-free maps created by stitching together overlapping aerial photographs. These outputs provide a precise top-down view of the survey area.
-
Micro-Habitat Delineation: We map distinct vegetation zones, wetland boundaries, and transition areas (ecotones) at a centimeter-level resolution, providing greater detail than standard satellite imagery.
-
Invasive Species Identification: High-resolution RGB imagery allows for the visual identification and mapping of specific invasive plant species based on their distinct coloration or flowering periods.
-
Habitat Fragmentation Analysis: The data allows for the measurement of distances between habitat patches, the length of edge habitats, and the assessment of wildlife corridor connectivity.
3D Topographical and Structural Surveys
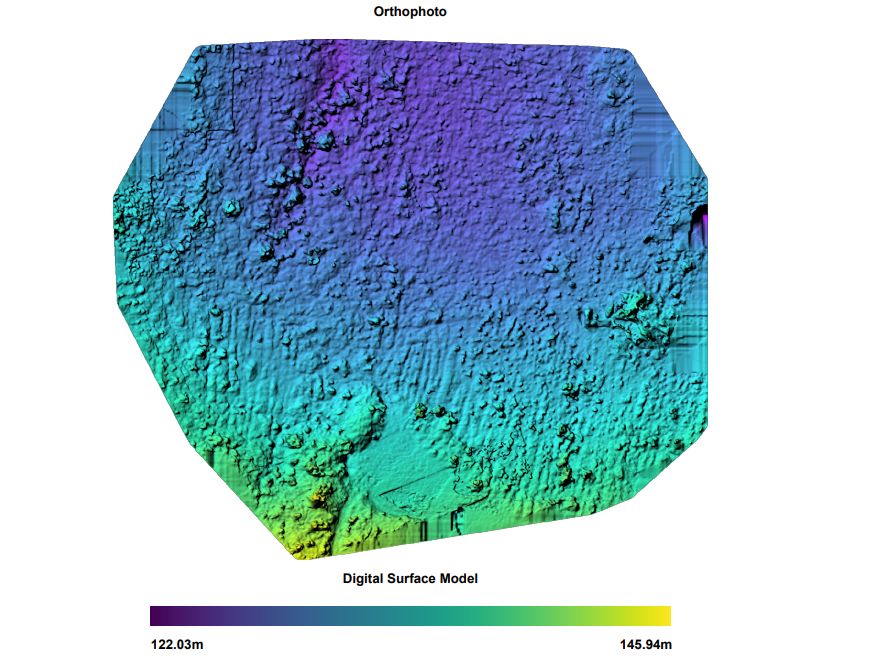
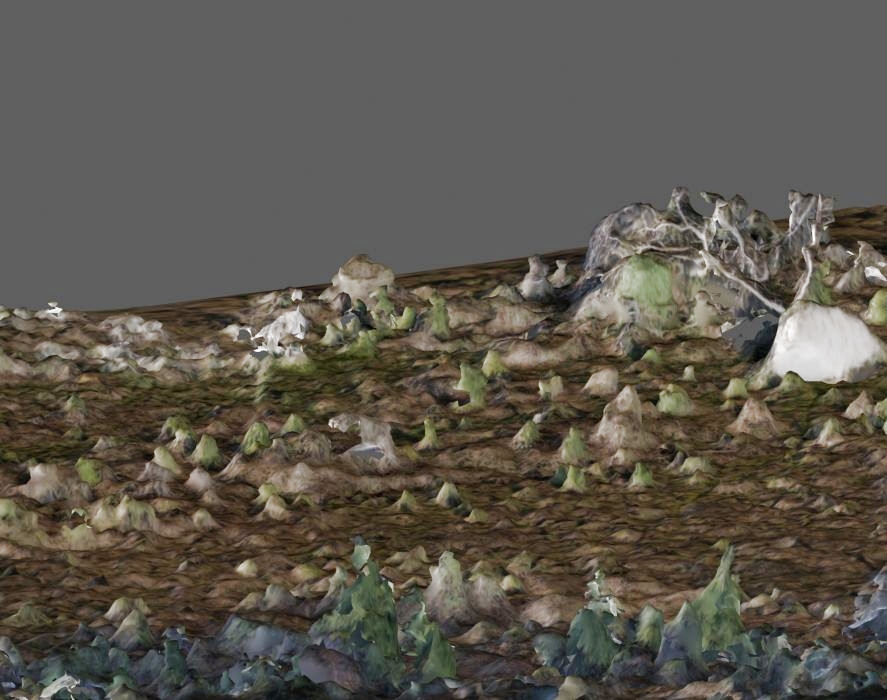
Using Structure from Motion (SfM) software, we process 2D images to construct accurate 3D models of the ecosystem, allowing for the analysis of physical vegetation structure and ground topography.
-
Canopy Height Models (CHM): By generating a Digital Surface Model (DSM, representing the top of the vegetation canopy) and a Digital Terrain Model (DTM, representing the bare ground), we can calculate the specific height of forest or scrub canopies.
-
Biomass and Carbon Estimation: Structural metrics derived from our 3D models can be correlated with ground-truthed data to support the estimation of above-ground biomass and carbon storage.
-
Hydrology and Geomorphology Mapping: DTMs allow for the modeling of surface water flow, the identification of pooling areas in wetland ecosystems, and the measurement of coastal or riverbank erosion over time.
Vegetation Health Assessments (RGB Indices)
While Near-Infrared sensors are standard for certain health metrics, vegetation vigor can still be estimated using purely RGB data through mathematical manipulation of the red, green, and blue pixels.

RGB Data Interpretation
-
Visible Atmospherically Resistant Index (VARI): We utilize VARI to assess canopy cover and relative plant health. This index measures the greenness of an area while minimizing atmospheric effects.
-
Phenology Monitoring: Through repeated surveys, we can map seasonal changes such as spring leaf-out or autumn senescence, providing data on phenological shifts and climatic impacts on local vegetation.
Wildlife Population Surveys
Standard RGB drone imagery is an effective method for direct population counts, particularly in areas that are difficult to access on foot.
-
Colony Counting: We conduct high-altitude orthomosaic surveys to capture nesting bird colonies or resting marine mammal populations. This method minimizes the disturbance associated with ground surveys or low-flying crewed aircraft.
-
Automated Detection: Orthomosaic outputs can be integrated with AI and Machine Learning models to facilitate the automated detection and counting of specific animal species across large survey areas.
Habitat Condition Survey
Temporal Change Detection and Monitoring
We offer repeatable survey programs to monitor changes in a specific landscape over time.
-
Restoration Monitoring: For sites undergoing rewilding, peatland restoration, or afforestation, we conduct automated grid flights at regular intervals (e.g., bi-annually). By analyzing the resulting orthomosaics and 3D models chronologically, we provide quantifiable data on landscape recovery and structural changes.